Note
Go to the end to download the full example code
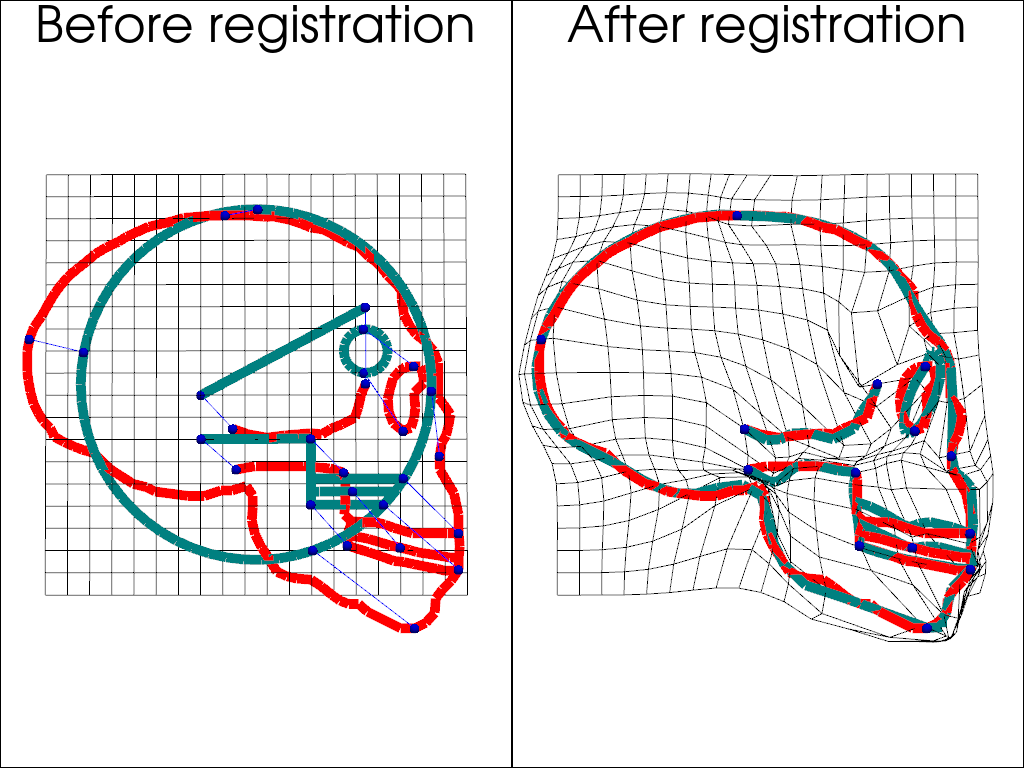
Registration with LDDMM¶
LDDMM is a deformation method based on geodesic shooting in the space of diffeomorphisms. In scikit-shapes, LDDMM can be expressed as an ExtrinisicDeformation model with n_steps > 1 and is parametrized by a momentum vector field over a set of control points.
import sys
import pykeops
import skshapes as sks
# This is a fix for the documentation, you can remove it if you are running the code in a script
sys.path.append(pykeops.get_build_folder())
Prepare the data¶
source = sks.PolyData("../data/skulls/template.vtk")
target = sks.PolyData("../data/skulls/skull_neandertalis.vtk")
# Add control points to the source shape
source.control_points = source.bounding_grid(N=20, offset=0.1)
# Add landmarks to the source and target shapes
source.landmark_indices = [94, 84, 105, 95, 106, 131, 116, 136, 68, 79, 31, 61, 47, 19]
target.landmark_indices = [49, 37, 36, 29, 13, 72, 24, 0, 59, 51, 156, 103, 123, 169]
Apply the registration¶
The loss function is a combination of the landmark loss and the optimal transport loss. The model is the LDDMM model with 5 steps of discretization with a Gaussian kernel. We use a 50x50 grid as control points.
loss = sks.LandmarkLoss() + sks.OptimalTransportLoss()
model = sks.ExtrinsicDeformation(
n_steps=5,
kernel="gaussian",
scale=8,
control_points=True
)
registration = sks.Registration(
model=model,
loss=loss,
optimizer=sks.LBFGS(),
n_iter=1,
verbose=True,
regularization_weight=0,
)
morphed = registration.fit_transform(source=source, target=target)
Initial loss : 5.18e+02
= 5.18e+02 + 0 (fidelity + regularization_weight * regularization)
Loss after 1 iteration(s) : 7.31e+00
= 7.31e+00 + 0 (fidelity + regularization_weight * regularization)
Visualize the result¶
import numpy as np
import pyvista as pv
source_color = "teal"
target_color = "red"
cpos = [(-20.266633872244565, 9.52741654099364, 653.2794560673151),
(-25.034557342529297, 25.013988494873047, 0.0),
(0.0009758954196487321, 0.9997188263985942, 0.023692103586369296)]
plotter = pv.Plotter(shape=(1, 2))
plotter.subplot(0, 0)
plotter.camera_position = cpos
plotter.add_text("Before registration", font_size=20, position="upper_edge")
plotter.add_mesh(source.control_points.to_pyvista(), color="black", line_width=1)
plotter.add_mesh(source.to_pyvista(), color=source_color, line_width=10)
plotter.add_mesh(target.to_pyvista(), color=target_color, line_width=10)
source_landmarks = source.landmark_points_3D.detach().cpu().numpy()
target_landmarks = target.landmark_points_3D.detach().cpu().numpy()
all_landmarks = np.concatenate([source_landmarks, target_landmarks], axis=0)
lines = []
for i in range(len(source_landmarks)):
lines.append(2)
lines.append(i)
lines.append(i + len(source_landmarks))
landmarks = pv.PolyData(all_landmarks, lines=lines)
plotter.add_mesh(landmarks, color="blue", line_width=1)
plotter.add_points(landmarks.points, color="blue", point_size=10, render_points_as_spheres=True)
plotter.subplot(0, 1)
plotter.camera_position = cpos
plotter.add_text("After registration", font_size=20, position="upper_edge")
plotter.add_mesh(morphed.control_points.to_pyvista(), color="black", line_width=1)
plotter.add_mesh(morphed.to_pyvista(), color=source_color, line_width=10)
plotter.add_mesh(target.to_pyvista(), color=target_color, line_width=10)
morphed_landmarks = morphed.landmark_points_3D.detach().cpu().numpy()
all_landmarks = np.concatenate([morphed_landmarks, target_landmarks], axis=0)
lines = []
for i in range(len(morphed_landmarks)):
lines.append(2)
lines.append(i)
lines.append(i + len(morphed_landmarks))
landmarks = pv.PolyData(all_landmarks, lines=lines)
plotter.add_mesh(landmarks, color="blue", line_width=5)
plotter.add_points(landmarks.points, color="blue", point_size=10, render_points_as_spheres=True)
plotter.show()
Total running time of the script: (0 minutes 5.018 seconds)